連載:リアルハプティクスⓇ
第2回「力触覚の技術」
ロボットがモノの感触を感じながら力を加減するために
予め決められたルールに従い、高速で同じ動きを精密に繰り返すロボット。遠隔地から人が操作することで、危険や人材不足を解消してくれるロボット。これらはすでに広く活躍していますが、ロボットにさらに力触覚と即座に反応する能力を与える技術が、リアルハプティクスⓇです。
第1回「人とロボットが共存していくために」をお読みいただきありがとうございました。第2回では「力触覚の技術」として、さらにリアルハプティクスⓇを見てまいります。
柔らかな力加減で制御するとは
冷奴をイメージしてみてください。豆腐は柔らかく、また表面も大変滑りやすいため、箸でつかむのは難しいことがあります。豆腐を崩さないよう優しく扱わなくてはならない一方で、滑り落ちないように箸にはある程度の力も入れなくてはなりません。このような動きはロボットにとっても難しく、ロボットで実現するには対象物の反応を見ながら柔らかな力加減で制御を加える能力が必要です。

ロボットと力触覚
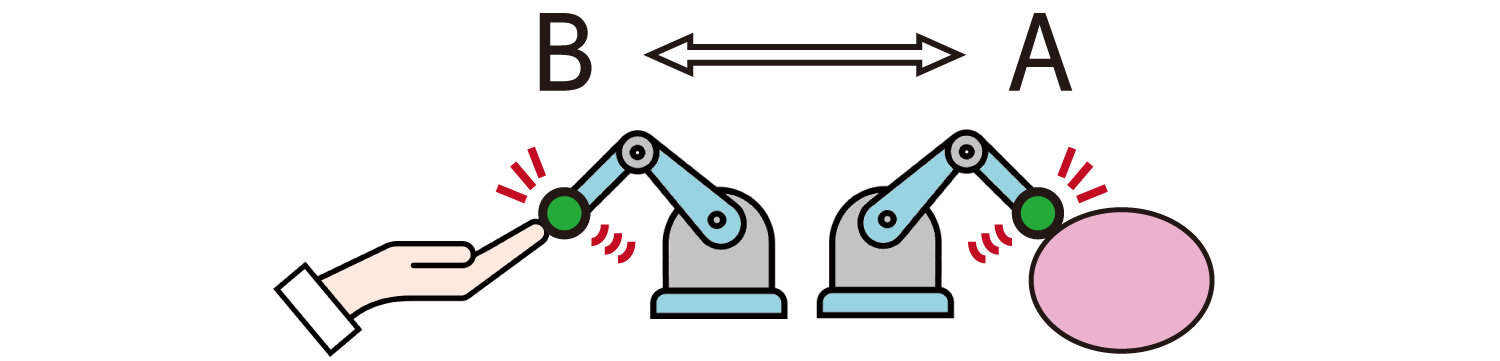
人が箸で冷奴をつかむ動作を仮にロボットを通して遠隔で行う場合、ロボットはアームを通じて人の力加減を含む動作のデータを取得します。しかし取得するだけでは完結しません。受け取った力加減を含む動作を遠隔地で再現することが必要です。
また遠隔操作ロボットが動作を再現するためには、力触覚データの高速伝送も必要です。対象物に触れるロボット(A)と、操作するロボット(B)が遠隔地に存在していても、2つのロボットが高速で鮮明な力触覚を伝送する能力が求められるのです。
ロボットとリアルハプティクスⓇ
刻々と変化する作業環境や対象物が弾性変化するなど一定でない場合、またセンシティブな対象物を相手に力加減を必要とするシーンでは、下記のような課題がありました。
・人の手・ベテラン職人の介入が必要
・絶えず加減して取り扱うため自動化が難しい
・予測不能な動きに瞬時に対応できない
・AIによる画像診断だけでは判定が難しい
このような課題をロボットで解決するためには、1.情報を高速で捉え、2.鮮明に伝送し、3.しなやかに再現する、ことが求められます。これらを掛け合わせた能力をロボットに与えることができるのが、リアルハプティクスⓇです。
リアルハプティクスⓇなら、ロボットが人のようにときには力強くときには優しく働きかけることができ、これまでにないロボットの応用先が拓けます。
第3回「力触覚の有用性」
次回は、力触覚の定義を交えて「力触覚の有用性」を見てまいります。ぜひお読みください。
関連分野

関連サービス・技術
お問い合わせ
お気軽にお問い合わせください