高度制御
プラントの能力を最大限に発揮する高度な運転を実現
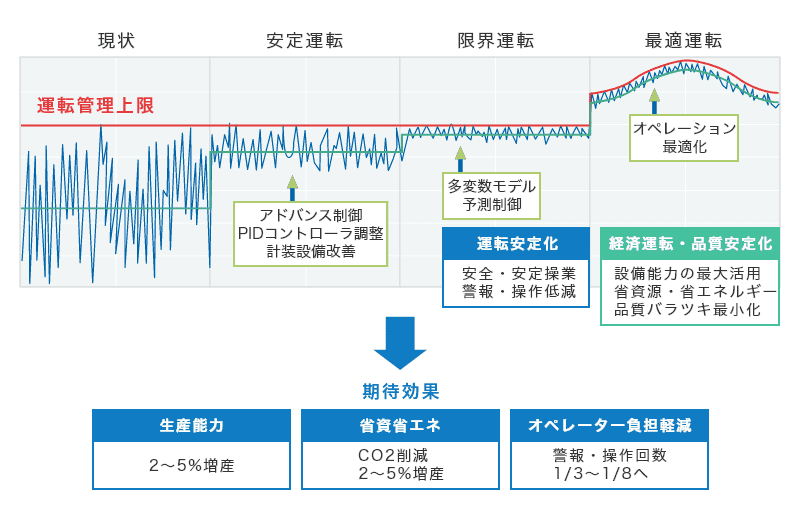
高度制御技術(APC)により安定操業、効率的な製造を実現。品質の安定化・向上や省エネ、生産量最大化を達成します。
強み・特長
1幅広く高度制御プロジェクトを経験
オレフィン、ボイラー&パワー、空気分離、塩化ビニルモノマー、アルコール、アンモニア、改質剤、アクリル酸、フェノール、ビスフェノールA、ポリエチレン、ポリプロピレン、…
2生産システム全体設計とトータルソリューション提供
フィールド計器からリアルタイム最適化まで
3設計基本方針:プラント運転の視点にたって
- 安全性と信頼性の確保
- 基本制御と高度制御の自立共存
- オペレータを中心にした設計とトレーニング
- 基本制御システムの十分な活用
システム概容
省エネ・コスト削減・運転負荷軽減・生産性向上・品質安定化に寄与します。
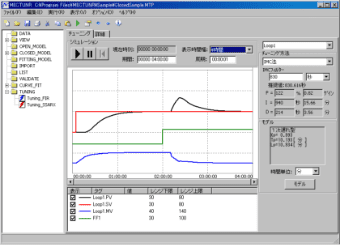
モデリング&PIDチューニング(MECTUNR™)
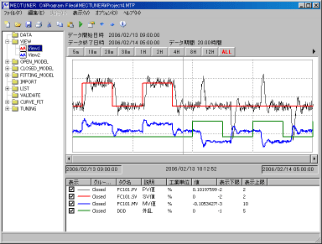
当社製品「モデリング&PIDチューニング(MECTUNR™)」は、三菱ケミカル株式会社のグループ各社で培われた高度な技術と豊富な実績をもとに、PID制御システムのためのプロセスモデルとPIDパラメータをシステマティックに決定する、システム同定・PIDパラメータチューニング・シミュレーションを行うビジュアルツールです。多様なモデル作成を可能にする閉ループシステム同定をサポートしています。

トレンド画面
システム同定画面
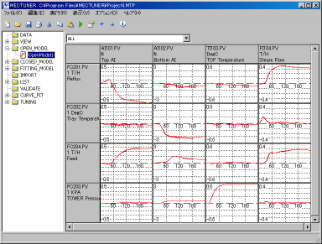
シミュレーション画面
用途
お客さまの製造設備のPID制御することで、生産効率化を実現できます。
事例:蒸留塔温度制御
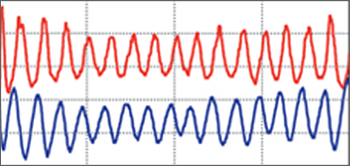
チューニング前(P,I,D=300%,120sec,80sec)
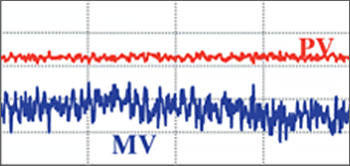
チューニング後(P,I,D=25%,2000sec,80sec)
多変数モデル予測制御(MECMACS™)
当社製品「多変数モデル予測制御(MECMACS™)」は、化学プラントの製造現場で培われた高度な技術と豊富な実績をもとに、多変数モデル予測制御・PID制御・ソフトセンサーなど高度制御の必須機能を網羅したシステムパッケージです。充実したサポートツールが安全・安定かつ経済的に最適な運転を実現します。

システム概要
任意データのヒストリカル保存・データ演算・ロジック演算・トレンド表示・データ収集など充実したサポートツールが高度制御エンジニアリングを支援し、安全・安定かつ経済的に最適な運転を実現します。
オンライン
- モデル予測制御
- PID制御
- HMI
- DB
オフライン
- データ処理
- モデル作成
- モデル定義
- 制御シミュレーション
モデリング画面
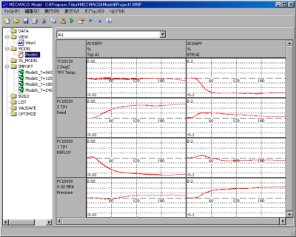
HMI画面(トレンド)
シミュレーション画面
MECMACS™は、お客さまの生産プラントの生産効率化・省エネ化・安全安定運転の実現に最適なシステムです。



技術・サービス
お問い合わせ
お気軽にお問い合わせください